
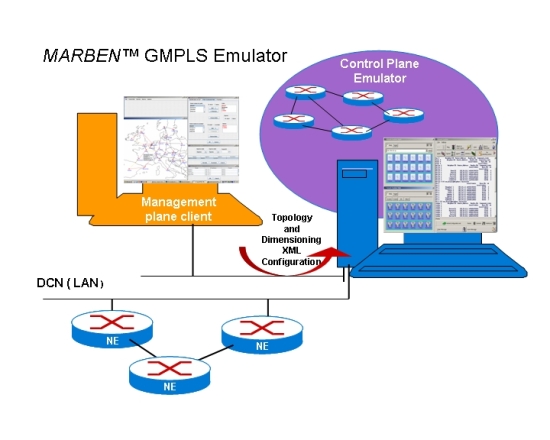
MARBEN GMPLS Emulator
MARBEN GMPLS testing tool has been implemented using the MARBEN Network Emulator and the MARBEN GMPLS Signalling and Routing controllers link resource manager for a complete GMPLS control plane emulation. The MARBEN GMPLS Emulator has been first qualified during the European Tbones Project (InfoCom 2005) and initially demoed during OIF demo in 2007 and 2009.
MARBEN GMPLS Emulator is targeted at testing purpose to:
- Validate the control plane software - e.g., protocol implementations, embedded in real nodes running in front of the emulator;
- Stress the control plane software embedded in real nodes running in front of the emulator (for instance by triggering transport plane failures in the emulator);
- Assert the scalability of the control plane software embedded in real nodes running in front of the emulator, when increasing the number of nodes and links (bundled or not) within the emulator;
- Validate the different constrained path computation algorithms embedded in real nodes running in front of the emulator.
MARBEN GMPLS Emulator has three distinct profiles:
- UNI v1.0 and UNI v2.0 interface (SONET and Ethernet);
- E-NNI v1.0 & v2.0 signaling and E-NNI v1.0 routing (SONET and Ethernet);
- GMPLS peer model (SONET and Ethernet).
Key features
- Support of hundreds of node, limited only by hardware configuration;
- Intra and inter-area routing;
- Link bundling;
- Support of distinct SCN and Transport plane addressing schema;
- Explicit route control (including explicit resource control);
- E-NNI v1.0 and UNI v1.0 R2 and v2.0 support;
- End-to-end dynamic and pre-planned rerouting;
- Make-before-break rerouting;
- Control Plane Emulator running on Linux 2.4/2.6 or Solaris;
- Management plane Client Java Web Interface.